
Static and Dynamic Stability
Part 4
By Greg Gremminger
The following technical discussion of the issues affecting pilot and machine instabilities are intended only to raise our attention and appreciation of the complexity of these issues - to help us be aware when we might be treading into territory in which we or the machine might not be prepared to avoid unexpected dangers. I hope these discussions do clarify for you some of these complex issues, and WHY the whole issue of stability is not as simple as it may intuitively seem. You may not fully understand these discussions, or you may not exactly agree with these theories - that is not the point! The goal is that we all much more fully appreciate that there may be dangerous surprises when you venture to the extremes of your personal safe gyro flight envelope.
The previous installment established the STATIC moments or factors which determine the STATIC position of the Center of Gravity (CG) relative to the Rotor Thrust Vector (RTV). This installment discusses how this relative positioning effects the stability of the gyro and ultimately of the gyro/pilot system.
First, a discussion of terms:
Pilot Induced Oscillations (PIO):
A condition where the pilot’s reactions are out of phase (timing) and/or out of amplitude so as to cause the gyro/pilot system to be unstable - resulting in pitch oscillations which may diverge to end in an unrecoverable Power Push-Over (PPO) event. This is usually the result of inadequate pilot proficiency in that particular gyro in those specific conditions. This condition is most likely at higher airspeeds and higher power settings where control sensitivities in some gyro configurations may become extreme. The susceptibility to PIO may also be significantly heightened if flight conditions cause the CG to move significantly aft of the RTV. Uncorrected PIO can often result in a Power Push-Over.
Power Push-Over (PPO):
An unrecoverable event wherein the gyro pitches forward (nose-down) rapidly and violently, beyond the pilot or machine’s ability to stop it. The sensitivity of any particular gyro configuration to PPO depends on many factors. If the conditions for a particular gyro are right, a PPO may be initiated by a strong downward or aft wind gust gradient (wind shear) or a rapid forward movement of the stick by the pilot. PPO susceptibility is often heightened at high power settings and high airspeeds, especially if flight conditions cause the CG to move aft of the RTV. PPO may also be initiated at any speed by any rapid forward movement of stick that induces reduced or negative g’s or reverse airflow through the rotor - most commonly initiated in a rapid push-over-the-top of a zoom climb. The ultimate result of a Power Push-Over is a loss or reversal of airflow through the rotor. Under this condition, cyclic control is lost, and the rotor quickly slows and flaps violently and usually impacts other parts of the gyro as the machine “tumbles” out of the sky!
Static or Steady-State:
The non-disturbed condition or state of a system - the initial condition before a disturbance. In this discussion, the term STATIC refers to airframe attitude or CG location while the gyro is in steady flight. A statically stable system is one which tends to return to the initial steady-state condition after a disturbance. A statically unstable system is one which tends to diverge further from its initial condition once it is disturbed - and never returns to that initial condition without corrective action.
Dynamic Stability:
The transient or oscillatory response of a system to an initial disturbance - for aircraft, usually a wind gust or a pilot cyclic control input. The technical definition of pitch DYNAMIC stability is that pitch oscillations (nose up/down, speed higher/lower) tend to dampen and disappear on their own. A dynamically unstable system is one in which a change in one direction tends to increase the change in that same direction, thereby intensifying further disturbance or oscillations. Conversely, a dynamically stable system is one in which a change in one direction tends to induce a lesser change in that direction and thereby reduce or “damp” the disturbance or oscillation.
Static and Dynamic Stability:
The ultimate major contributor to the tendency of a gyro/pilot system to diverge into PIO (leading ultimately into a PPO event) is the DYNAMIC pitch stability of the system. Dynamic means the response of the gyro/pilot system to a disturbance - usually a wind gust or a pilot cyclic control input. The dynamically unstable gyro/pilot system tends to oscillate in pitch in larger and larger oscillations - PIO!
The ultimate major contributor to the tendency of the gyro to diverge into a PPO event is the STATIC pitch stability of the gyro. To visualize a statically unstable gyro, consider a gyro/pilot system whose sudden forward control stick movement (cyclic) causes the rotor disk (AOA) to pitch forward, suddenly reducing its thrust (lift and drag). If this suddenly reduced rotor thrust tends to cause the gyro airframe to pitch forward further, that forward pitching may cause additional (UNCOMMANDED) cyclic control input to further pitch the rotor disk forward. And then the forward pitching accelerates itself at an increasingly furious pace - until the actual PPO event - full Push-Over within a split second! This scenario is certainly not the case in every situation, but it serves to demonstrate an example of STATIC INSTABILITY. There are a number of factors which must add up to make this situation unstable and fatal. These factors include a tendency for the airframe to pitch forward upon loss of rotor thrust (lift and drag), and the compounding control inputs (or lack of) from the pilot.
It is not necessary to fully distinguish between gyro Static and Dynamic pitch instabilities when considering PIO or PPO tendencies. Both are aggravated by the same gyro configuration factors, and a dynamic PIO response may often lead to the static PPO event. Both the dynamic and the static stability of the gyro/pilot system may also be tempered or aggravated by the pilot skills or lack thereof.
For a gyro, the serious aggravation to STATIC stability occurs upon sudden or rapid nose down pitching of the rotor disk - as opposed to a sudden nose up rotor disk pitch motion. This is because the rotor so rapidly loses thrust (lift and drag) and CONTROL POWER upon rotor disk AOA approaching zero degrees. In the other direction, increasing rotor disk AOA, increasing control power, increasing lift and drag do con- tribute to DYNAMIC instability and may contribute to PIO, but they do not lead directly to PPO in that direction. In the forward or nose down pitching direction however, things can rapidly go to heck in a handbasket! For this reason, this discussion will concentrate on the mechanisms that can cause a sudden and/or uncommanded nose down pitching motion which may tend to cause further nose down pitching moments. These same static and dynamic stability mechanisms do, however, apply equally in the opposite direction as well.
What’s the big deal about where the CG is?
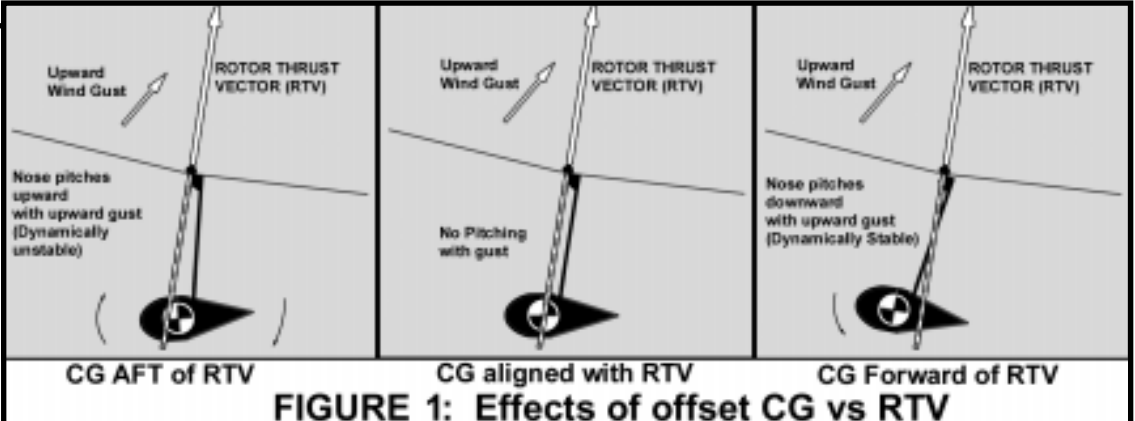
The longitudinal location of the CG relative to the RTV is a big deal - DYNAMICALLY! (Figure 1)
The CG longitudinal (fore/aft) position in relation to the RTV helps determine the dynamic pitch stability. The CG should be at or forward of the RTV enough to assure that the airframe nose responds INTO a vertical wind gust. This is to say that a sudden increase in Rotor Thrust will cause the nose to respond downward - and vice-versa for a sudden decrease in Rotor Thrust. If the CG is not adequately forward of the RTV, a downward wind gust or suddenly decreasing relative wind, for instance, causes the airframe to respond with a nose-down pitch, which may, through cyclic rotor input, cause the rotor to further pitch down, again causing the nose to pitch down further - and so the furious acceleration may initiate a PPO event. This furious acceleration, or the speed at which it happens, may be worsened, improved or eliminated by numerous other factors such as the offset gimbal/trim spring; the moment of inertia of the airframe; the moment of inertia or centrifugal forces of the spinning rotor; the aerodynamic properties of the fuselage/airframe and horizontal stabilizer; a pitching moment from the thrust of the propeller; etc. This furious acceleration may only be stopped through the interference of the pilot’s quick and proficient reaction, requiring quicker and more proficient reaction in a machine prone to quicker PPO. A rearward CG may greatly increase the gyro’s control sensitivity requiring even much more sensitive and exacting control reactions by the pilot to interfere with an incipient PPO action.
An inadequately forward CG also greatly increases the probability of a PIO situation. As the position of the CG relative to the RTV moves more rearward, the reaction of the machine to control inputs (rotor thrust changes) becomes more sensitive. This is because rotor thrust (lift and drag) changes induce varying degrees of pitch reaction in the airframe - depending on the CG direction and distance from the RTV. If the airframe pitches in a direction which tends to negate some of the pilot’s cyclic input into the rotor (as it will if the CG is well forward of the RTV), the pilot is less likely to over-react. This is called “negative feedback”. All control systems, hydraulic, electrical, human, etc. require negative feedback in order to “stabilize the loop” and accomplish precise control.
On the other hand, if the CG is positioned aft of the RTV (as it might be through aerodynamic forces or propeller thrust), rotor thrust changes will induce a pitch reaction which tends to add to the pilot’s commanded cyclic control input. This is called “positive feedback” and tends to “destabilize the loop”. The pilot will be required to make a compensating “quick jab” in the opposite direction to stop a further than required pitch change (overshoot) from diverging into PIO. The further the CG shifts aft relative to the RTV, the less stable the gyro/pilot system is and the more skill required to stabilize the system. Also, the whole situation is compounded at higher airspeeds because the rotor is much more responsive to slight rotor disk angle of attack (AOA) changes – just like a wing is more sensitive to angle of attack changes at high speed!
Stick Free and Stick fixed DYNAMIC stability:
Test pilots for certified aircraft, as a requirement for aircraft certification, determine the dynamic stability of the aircraft in the “stick free” and the “stick fixed” modes. Basically this means they jab the stick and either let go of the stick (stick free), or pulse the stick and hold it in position and not allow it to move (stick fixed). This is very analogous in a gyro and is an important concept to under- stand. For certified aircraft, that aircraft must meet a stability requirement in both regimes. This should also be the goal in your gyro also.
In the previous installment of this series of articles, we discussed how the pilot, tightly restricting movement of the stick, or any friction in the controls, can input an UNCOMMANDED cyclic control input into the rotor. This would be the “stick fixed” regime the test pilots use. We discussed in the previous installment that any friction or stick restriction by the pilot CAN cause an uncommanded rotor response if the airframe is caused to “swing” or pitch. The above discussions of pitching mechanisms due to sudden lift and drag changes are just such airframe swings we are concerned with. In the previous installment we suggested that the pilot allowing the stick to float freely might avoid these uncommanded cyclic inputs. This is certainly true for the pitching mechanisms discussed above also.
The effects of a poorly located CG (a tendency to induce de-stabilizing pitching moments) can be somewhat avoided via the pilot technique of allowing the stick to float “free”. This is one of the reasons experienced pilots may be able to fly an “unstable” gyro configuration safely! And this is the way that all pilots are taught to fly all aircraft - gentle pressures on the controls and allow the controls to float freely. This may be much easier said than done - by inexperienced pilots who tend to tense up, or by any of us in a tense or unfamiliar situation! If we are flying a gyro whose pitch stability is questionable due to its CG location, it is absolutely necessary that we fly that machine in the “stick loose” mode - otherwise, the WRONG DIRECTION pitching mechanisms are likely to induce destabilizing cyclic controls into the rotor! It is also important to understand that, in the case of a gyro as opposed to a fixed-wing, the CG may shift or “swing” rearward - into this unstable realm - at higher speed or power settings as well as because of turbulence or pilot PIO reactions. These are things that don’t even occur on “fixed-wing” aircraft because they are not pendulums hanging from a gimbal well below their lifting surfaces!
It is important to realize further, that government requirements for fixed-wing certification, even without many of the stability and control aggravating mechanisms that exist in gyros, still require that fixed-wing aircraft be stable in BOTH the “stick free” AND the “stick fixed” modes! That is to say, the government does not depend on pilot skills to avoid unstable situations in certified aircraft! They probably do this for a reason - they may have learned that Murphy often rules the airways also - “if it can happen it will!” Does the gyro you are flying meet the stick free and stick fixed criteria for inherent stability? Does it meet these criteria in all flight regimes and environments? Does it require proficient pilot skills, especially at speeds or power or turbulent conditions you are not practiced in? You probably don’t know? And I would not recommend trying to find out! You would only know if you performed all the test pilot tests that they do - at high power and high speed! And those test pilots wear parachutes and get paid the BIG BUCKS for good reason! Think about it! Know your gyro safe flight envelope and stay in it!